
HoloLens 2 鼻梁部位有两个用于眼动追踪的红外相机,在镜框的四周有一圈红外LED,数量为12颗;当HoloLens 2 开机后,红外LED会不停地闪烁,以此照亮眼球,使得红外相机获取眼球图像数据用于眼动追踪计算,其支持实时的眼动追踪和注视点渲染,可用于实时与虚拟物体进行交互、操控显示页面等。
在HoloLens 2 中,眼动追踪可以用于自动翻页,直接与虚拟内容交互,例如你看到一个虚拟人物就会直接产生对话,这样的体验会更为自然。重要的是,即便你佩戴眼镜,HoloLens 2 眼动追踪效果同样出色,和其它方案相比出错率更低。微软甚至宣称,眼动追踪技术还可以通过观察你眼睛微弱的变化,来感知预测个人情绪。值得一提的是,HoloLens 2 的眼动追踪相机支持虹膜扫描,与操作系统结合后,可实现个人账户的登录和管理。
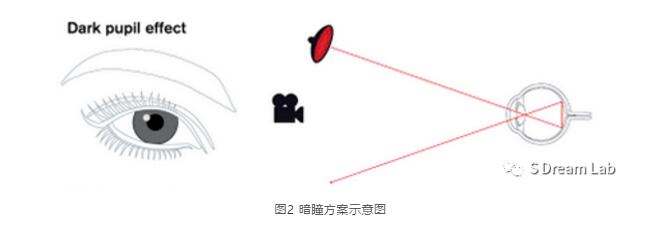
从HoloLens 2 眼动追踪硬件构成判断,其眼动追踪方案是基于红外LED照明的角膜反射暗瞳方案。如图2所示,该方案原理是,光源与成像相机不在同一条光学路径上,使得相机能获取到瞳孔比虹膜暗很多的图像,并在角膜上产生普尔钦亮斑,在这种形成强烈反差对比特征的图像上,有利于正确提取瞳孔中心、普尔钦亮斑中心等特征位置。
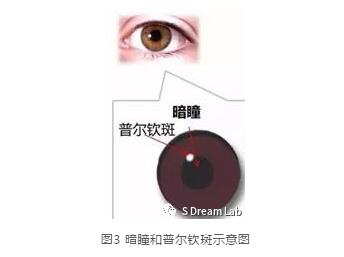
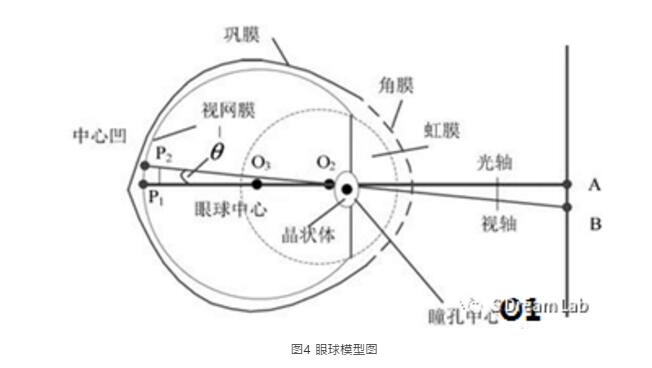
如图3所示,普尔钦亮斑由进入瞳孔的光线在角膜外表面上反射而产生,由于眼球近似球体,照射在上面的闪烁点位置基本不会随着眼球的转动而改变。在HoloLens 2 的眼动追踪系统中,红外光源、相机的位置都是不变条件,并且在如图4示意的眼球模型的结构基础上,利用普尔钦亮斑中心与光源位置计算得到角膜曲率中心O2;然后,再计算获得瞳孔中心O1。通过角膜曲率中心O2与瞳孔中心O1的连线求得眼球光轴,并利用光轴和视轴之间的夹角计算得到真实的视线方向—视轴。
瞳孔角膜反射技术需要注意两个问题,校准和多个红外光源补光。校准是由于人眼视轴与光轴存在固有的生理偏差,为了得到真正视线的方向或注视点的位置,需要进行校准;多个红外光源补光是因为在智能眼镜使用过程中,用户的头迅速摆动或者眼睛大幅度运动时,AR眼镜与眼睛的相对位置会改变,普尔钦亮斑点在眼睛上的位置也会产生微量位移,造成注视点位置计算产生误差,并且眼动追踪系统的光源和摄像头距离眼睛很近,普尔钦亮斑点可能会被眼睑、睫毛等挡住红外摄像头的视线,造成视线方向的计算产生误差,所以,为了解决上述问题会通过2个或者2个以上的红外光源打在眼球上面,利用角膜上多个普尔钦亮斑点共同计算角膜中心,图像识别获取瞳孔中心,利用眼球模型计算获取三维空间的光轴,增加计算视线方向的鲁棒性。
从HoloLens 2 眼镜上用于眼球照明的红外LED灯数量看(单目12颗),正是采用了上述多个红外光源补光技术,并且采用了9点校准法,使得眼动追踪系统计算的视线方向鲁棒性得到了很大提升。
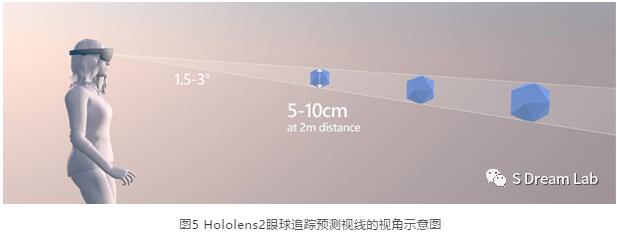
据微软官网介绍,HoloLens 2 提供Eye track API功能,开发人员可以以大约30 FPS(30 Hz)的速度进入单一的视线射线(视线起点和方向),如图5所示,HoloLens 2 眼动追踪预测的视线在实际目标周围的视角大约为1.5度以内,为了使眼动追踪准确地工作,每个用户都需要进行一次眼动追踪用户校准。
体验介绍
初次使用HoloLens 2 时,开机进入主界面后,会提示用户进行眼动追踪系统的校准。
点击确认后,进入校准引导界面。
按照提示,眼镜的显示屏幕将依次显示钻石形状的虚拟物体。
眼睛依次注视这些虚拟物,总共进行9次交互操作完成眼动追踪系统的校准,校准的整体流程连贯、无明显滞后。
HoloLens 2 充分发挥了头戴式设备以及直接投射影像的优势,它的眼动追踪系统可以准确地识别用户在注视什么地方并且快速做出反应,体验很好。
当在视野中打开文字浏览窗口时,目光触及最后一行后,文字开始自动向上滚动,看似很简单的一个功能,但这是人机互动的一个巨大进步,计算机迈出了理解我们眼神的第一步。配合语音指令,眼神控制还能发掘出更有意思的操作。在面前的空间漂浮了一片宝石,只要随意注视任何一颗,然后说出“pop!”,那颗宝石就会瞬间化作一片光点,完全不需要手的参与,HoloLens 2 就可以让用户进行精确的定位和互动。